
Maan magneettikenttää hyödyntävää kompassia on käytetty vuosisatoja merillä navigoimiseen. Sisätiloissa ongelmana on olleet rakenteiden aiheuttamat vääristymät, mutta häiriöt voidaan nähdä väitöskirjan mukaan myös hyödyllisenä paikannusinformaation lähteenä.
Sisätiloissa GPS-tasoinen paikantaminen älylaitteilla on ollut ongelma, jonka ratkaiseminen on kehitetty erilaisia aputekniikoita. Yksi lähestymistapa ongelmaan on magneettikenttään perustuva paikannus, jota käytetään jo kaupallisissakin palveluissa. Sitä hyödyntää esimerkiksi n oululainen startup-yritys IndoorAtlas, joka sai elokuussa 3,6 miljoonan euron pääohjarahoituksen Japanin Yahoolta.
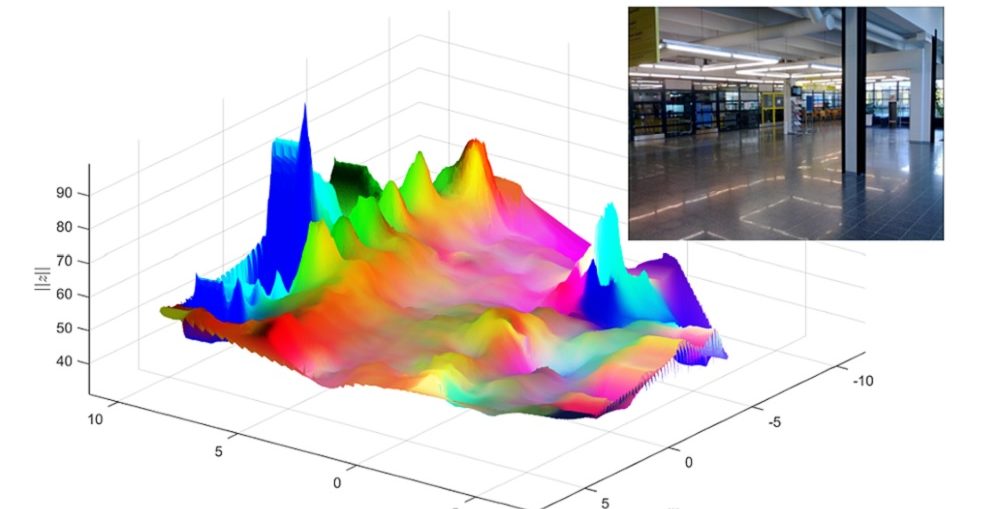
Rakenteiden aiheuttamat vääristymät, esimerkiksi teräspylvään aiheuttamaa muutosta magneettikentässä voidaankin käyttää paikan määrittämiseen vertaamalla sitä aikaisemmin kerättyyn magneettikentän häiriökarttaan. Näin voidaan luoda tarkkaa paikannusta esimerkiksi kappakeskuksissa tai museoissa.
Oulun yliopistossa filosofian maisteri (matematiikka) Ilari Vallivaara väittelee ensi viikon perjantaina 12.1. tohtoriksi magneettikartan menetelmästä. Väitöstyö esittelee päätuloksena, kuinka keräystyö voidaan automatisoida käyttämällä robotti-imurin kaltaista robottia.
Kerätystä datasta marginalisoidun partikkelisuodattimen avulla muodostetut kartat tarjosivat paikantamisen kymmenen senttimetrin tarkkuudella. Päätuloksen lisäksi työssä on kehitetty yleisempiä menetelmiä esimerkiksi tehokkaaseen lukujen näytteistykseen, karttojen esittämiseen ja niiden epävarmuuden hallintaan.
LISÄÄ: Ilari Vallivaaran väitöskirja Simultaneous Localization and Mapping Using the Indoor Magnetic Field (LINKKI, pdf) ja IndoorAtlas (LINKKI).
Kuva: Väitöskirjan aineistoa