
Uudenlaisiin pehmorobotteihin tarvittavien osien, kuten antureiden, tulee olla myös pehmeitä, jotta robotin toimintakyky ei kärsisi. Niissä käytettäviä materiaaleja ja tarttujia on tutkinut väitöskirjatyössään Tampereen yliopiston diplomi-insinööri Anastasia Koivikko.
Kovista materiaaleista pehmeisiin siirtymällä roboteista tulee turvallisempia: ne eivät vahingoita, vaikka törmäisivät ihmiseen, robotit mukautuvat pinnan muotoihin ja ne tuntuvat mukavammilta ihoa vasten.
Pehmorobottien osien kuten tarttujien ja antureiden tulee olla myös pehmeitä, jotta robotti säilyy kokonaan pehmeänä. Perinteiset sähköiset anturit ovat kuitenkin jäykkiä ja kovia ja siksi niitä ei voida käyttää pehmoroboteissa.
Anastasia Koivikon väitöskirjatutkimuksen tavoitteena oli tutkia uusia menetelmiä pehmeiden tarttujien ja antureiden toteutukseen. Erityisesti tavoitteena oli tutkia, kuinka näitä pehmorobotin osia pystytään valmistamaan yksinkertaisemmin ja integroimaan robottiin helposti.
Hänen väitöskirjassa tutkittiin kahta erilaista 3D-tulostettua imukuppimaista pehmotarttujaa. Ensimmäinen oli pneumaattinen ja toinen tarttuja hydraulinen ja sen jäykkyyttä voi säätää magneetin avulla.
’’Huomasimme, että muuttamalla pehmotarttujan jäykäksi kappaleen kuljetuksen ajaksi saavutimme suurempia pitovoimia. Tällaisella säädettävällä tarttujalla saavutetaan pehmotarttujan kyky mukautua poimittavan kohteen pinnanmuotoihin tinkimättä suuresta pitovoimasta’’, Koivikko kertoo.
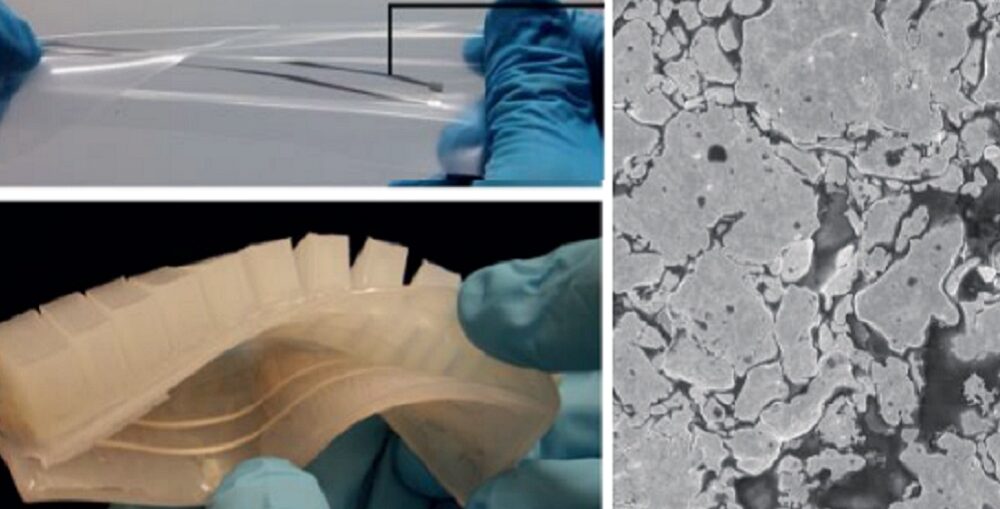
Väitöskirjan antureita käsittelevässä osassa esitetään kaksi eri menetelmää venyvien ja pehmeiden antureiden toteuttamiseen: sähköiset silkkipainoanturit ja pneumaattiset venymäliuskat. Niistä silkkipainoanturit ovat edullisia ja sopivat massavalmistukseen, kun taas pneumaattisilla antureilla olemme askeleen lähempänä kokonaan pneumaattisia pehmorobotteja.
’’Kokonaan pneumaattiset pehmorobotit eivät tarvitse sähköisiä komponentteja, mikä on suuri etu. Tulevaisuudessa tällaisia robotteja voidaan käyttää esimerkiksi voimakkaassa säteilyssä, joka voi tuhota sähkökomponentteja’’, Koivikko kertoo.
Koivikko työskentelee tällä hetkellä Tampereen yliopistossa tenure track -professori Veikko Sariolan johtamassa Luonnon inspiroimien materiaalien ja robotiikan tutkimusryhmässä. Hän on lähdössä vuodeksi yhdysvaltalaiseen Cornellin yliopistoon tutkijavaihtoon jatkamaan tutkimusta pehmorobotiikan parissa.
Diplomi-insinööri Anastasia Koivikon biolääketieteen tekniikan alaan kuuluva väitöskirja Grippers and Sensors for Soft Robots tarkasttiin Tampereen yliopiston lääketieteen ja terveysteknologian tiedekunnassa viime perjantaina.
Lisää: Väitöskirjatyö (LINKKI, 10,4 Mt pdf)
Aloituskuva: Väitöskirjasta rajattuna