
YHTEISTYÖARTIKKELI: Teollisuusautomatiikan sovelluksissa käytetään useimmiten kaksi anturityyppiä: valosähköisiä sekä induktiivisia lähestymisantureita. Molemmilla on omat hyvät ja huonot puolensa, jotka on hyvä ymmärtää ennen anturivalinnan tekemistä. Tämän advertoriaali-artikkelin on tuottanut komponenttijakelija TME.
Tyypillinen induktiivinen anturi tunnistaa metallisia esineitä, jotka voivat sijata läpinäkymättömän, metallittoman esteen takana, mutta valosähköisen anturin täytyy ”nähdä” kohde jossain valon ulottuvuudessa. Toisaalta, valosähköisellä anturilla tunnistamisen ulottuvuus saattaa olla laservalolla hyvinkin suuri, jopa muutaman kymmenen metrin pituinen. Niin suurta ulottuvuutta induktiivisilla antureilla ei voida toteuttaa.
Valosähköisen anturin toimintaperiaatteena on lähettimen säteilemän valonsäteen mittaus, joka osuu vastaanottimen valoherkkään komponenttiin. Anturin käyttötarkoituksesta riippuen, käytetään valon eri tyyppejä sekä moduloidaan valonsädettä.
Useimmiten käytetään ihmissilmälle näkymätöntä infrapunavaloa, jonka ansiosta tunnistaminen voidaan suorittaa tavalla, joka ei vie huomiota pois tehtävästä. Ratkaisulla on huonojakin puolia, minkä huomasi jokainen, joka on joskus asentanut tunnistusanturin, jonka tehtävänä on estää portin sulkeutuminen jos edessä seisoo vielä ajoneuvo.
Monet valosähköiset anturit ovat varustettu diodeilla, jotka ilmaisevat niiden toimintatilan, lukuun ottaen lähettimen ja vastaanottimen virheettömän yhteistoiminnan. Kyseisten diodien ja niiden valaistusvärien havaitseminen helpottaa antureiden sopivaa asennusta sekä lähdön tilan ja kohteelle ilmaistun reaktion virheettömyyden määrittämistä, mikä on erityisen tärkeää, kun herkkyys on säädettävä.
 Melkein jokainen rakentaja, elektroniikkainsinööri, käyttöinsinööri tai integraattori, pystyy arvioimaan kohdesovelluksen määrittämät vaatimukset ja valita siihen sopivan anturityypin. Siinä tärkeitä kriteereitä ovat anturin toimintaolosuhteet, ympäristön lämpötila, mekaaninen kestävyys (ja kaikki mainitut tekijät vaikuttavat kotelon materiaalin, sen IP-tiiviyden tason sekä asennusmenetelmän valintaan), valon tyyppi sopiva ympäristöön, anturin käyttötarkoitus ja tunnistamisen ulottuvuus, tarjolla oleva syöttöjännite sekä lähdön tyyppi.
Melkein jokainen rakentaja, elektroniikkainsinööri, käyttöinsinööri tai integraattori, pystyy arvioimaan kohdesovelluksen määrittämät vaatimukset ja valita siihen sopivan anturityypin. Siinä tärkeitä kriteereitä ovat anturin toimintaolosuhteet, ympäristön lämpötila, mekaaninen kestävyys (ja kaikki mainitut tekijät vaikuttavat kotelon materiaalin, sen IP-tiiviyden tason sekä asennusmenetelmän valintaan), valon tyyppi sopiva ympäristöön, anturin käyttötarkoitus ja tunnistamisen ulottuvuus, tarjolla oleva syöttöjännite sekä lähdön tyyppi.
Joissakin käyttötarkoituksissa suuri merkitys saattaa olla anturin reaktioajalla, vaikka sitä ei välttämättä odoteta antureilta, joilla on suuri ulottuvuus. Erittäin tärkeä kriteeri on myös tunnistettavan kohteen tai kohteiden tyyppi. Jotkut anturit reagoivat jo silloin, kun valonsäteen tiellä, lähettimen ja vastaanottimen välissä sijaitsee ohut, läpinäkyvä kalvo. Toiset vaativat lähes täyttä kohteen läpinäkymättömyyttä. Lisäksi herkkyyden säätöön tarkoitetulla potentiometrillä voidaan tarkasti asettaa toimintakynnyksen.
Anturia valittaessa kannattaa ottaa huomioon myös anturin valmistaja ja tuotemerkki. Esimerkiksi teollisuussovelluksissa sekä muissakin laitteissa anturin luotettava toiminta on olennaista, ei ainoastaan käyttäjien turvallisuuden takia, vaan myös sovelluksen käyttömukavuuden vuoksi. Esimerkiksi jos anturin valmistaja on Panasonic-yhtiö, voi olettaa, että se on suorittanut antureiden laadunvalvonnan huolellisesti ja tuotteet tulevat toimimaan varmasti ja vakaasti.
Nyt voimme tarkistaa, myös käytännössä miten tällaista anturia voidaan käyttää yhdessä minkä tahansa ohjelmoitavan logiikan PLC-ohjaimen kanssa. Kokeilussa käytetty ohjelma on valmistettu Siemensin LOGO! v8:lle, mutta FBD-kielen selkeyden ansiosta sitä voi suuremmitta vaikeuksitta mukauttaa käytettäväksi eri alustallakin.
Yhdellä valosähköisellä anturilla on erittäin vaikea tunnistaa kohteen liikesuuntaa. Jotta sen voisi ratkaista, pitäisi joko moduloida valonsäteen ja käyttää Doppler-ilmiötä, tai sitten mitata aikaa, joka kuluu kohteen suuntaan lähetettävien impulssisarjojen välissä.
Näitä menetelmiä on kuitenkin vaikea soveltaa käytännössä, ne ovat suhteellisen kalliita, eikä jokainen pysty pärjäämään niiden kanssa. Huomattavasti helpompaa on asettaa kaksi anturia vierekkäin ja tarkistaa niiden toiminnan järjestyksen. Kuvassa 1 esitetään kyseisen ratkaisun toimintaperiaate. Jos käytämme kahta anturia – numeroikaamme ne sovinnaisesti ”1” ja ”2” – niin toiminta ”1” ja sitten toiminta ”2” voi merkitä sovinnaista liikesuuntaa oikealle ja käänteisessä järjestyksessä – vasemmalle.
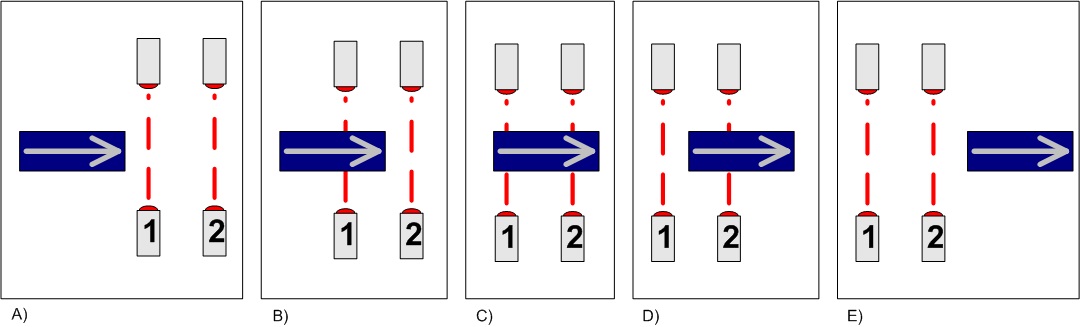
Silti, jos haluamme, että meidän algoritmimme toimisi varmasti ja että sitä voisi käyttää muihinkin tarkoituksiin, kuin pelkkään liikesuunnan tunnistamiseen, esimerkiksi kohteiden laskemiseen, on lisäksi otettava käyttöön tiettyjä rajoituksia. Ensimmäiseksi kohteen olisi liikuttava antureiden edessä, mikä johtaa toimintaan, mutta se lienee jo itsestään selvää. Toiseksi antureiden välinen maksimaalinen etäisyys ei voi olla suurempi kuin kohteen pienimmät mitat. Sen ansiosta anturimme tulevat toimimaan sopivassa järjestyksessä, esimerkiksi: molemmat epäaktiivisia -> 1 toimii, -> 1 ja 2 toimivat, -> 2 toimii -> molemmat ovat epäaktiivisina.
Kolmanneksi tarkistettavan kohteen antureiden välissä tapahtuvien satunnaisten liikkeiden ei pitäisi aiheuttaa järjestelmän virheellistä toimintaa. Koska kyse on kuitenkin ohjelmasta, joten ei voida koskaan sulkea pois kaikkia loogisia virheitä. Se kannattaakin tarkistaa huolellisesti simulaattorin tai mallijärjestelmän avulla sekä testata algoritmit tilanteissa, jotka saattaisivat tapahtua todellisuudessa.
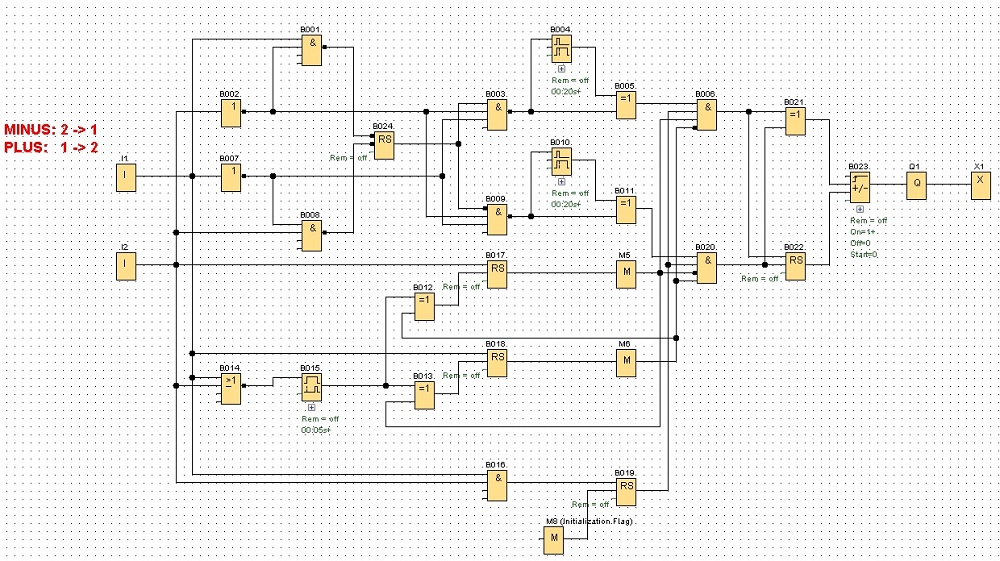
Kuvassa 2 esitetään FBD-kielellä laadittu ohjelma, joka oli kehitetty ilmaisessa LOGO! Soft Comfort ympäristössä. Jos käytämme LOGO!-ohjainta, I1- sekä I2-tuloille on syötettävä jännite, joka edustaa loogista ”1”. Jos kyseessä olisi LOGO! 24RC, niille pitää syöttää jännite, jonka arvo olisi arvoalueella 18…24 VDC. Jos käyttäisimme puolestaan mallia, johon syötetään 230 voltin AC-vaihtojännite, siinä tapauksessa loogista ”1” edustaisi huomattavasti korkeampi jännite. Silloin pitäisi ottaa huomioon myös anturin tyyppi ja sen lähtöparametrit.
Kuten oli mainittu, jännite antureiden liittimistä on syytä syöttää I1-tuloon (anturista 1) sekä I2-tuloon (anturista 2). Ohjelma on kehitetty siten, että liikesuunta I1:sta I2:een johtaa impulssin generointiin B020- portin lähdössä, kun taas I2:sta I1:een – B006-portin lähdössä.
Sovelluksen hyödyllisyyden esittämiseksi, molempien porttien lähtöihin on liitetty kaksisuuntainen laskin (B023) sekä logiikkapiiri (B021 – portti XOR, B022 – kiikku RS). Logiikkapiirin tehtävänä on asettaa laskusuunnan tulo, jos saapuvat ”positiiviset” impulssit (portista B020) ja nollata se, kun negatiiviset impulssit saapuvat (portista B006), sekä määrittää kello-aaltomuoto, joka syötetään laskun tulolle. Laskusuunnan tulon asettamisen ja nollaamisen ansiosta laskin laskee ylös (asetettu tulo) tai alas (nollattu tulo).
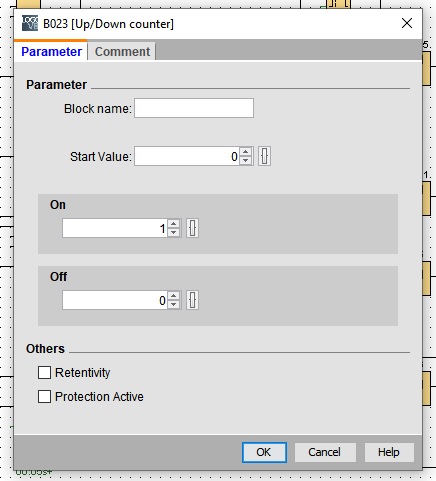
Up/Down Counter -laskurilohkolla LOGO!:ssa on lähtö, joka asetetaan ja nollataan laskurin ominaisuusikkunassa määritettyjen ehtojen mukaisesti. Kuvassa 3 sen kenttään ”On” kirjoitetaan ”1” ja kenttään ”Off” jätetään ”0”, niin lähtö on asetettu kun laskurin tila on suurempi kuin 0 ja se on nollattu, kun laskurin tila on tasan 0.
Jos kyseiseen lähtöön liitetään lisäksi Output-toimintolohko, esimerkiksi Q1, niin LOGO! 24RC-ohjaimen lähtöreleellä numero 1 tulee liittimiä, kun laskurin tila on suurempi kuin 0. Tällä tavalla voidaan nopeasti ja helposti rakentaa laite, joka automaattisesti sytyttää ja sammuttaa valaistuksen ja samalla se voi laskea eso,erlolso ihmisiä, jotka tulevat tiettyyn tilaan sisään tao poistuvat siitä. Valo syttyy aika, kun joku tulee sisään ja sammuu kun poistutaan.
Teksti: Jacek Bogusz / TME.
Lisää: TME (LINKKI) ja valosähköiset anturit (LINKKI)
TAUSTA: Komponenttijakelija TME on toteuttanut tämän advertoriaali-artikkelin valosähköisistä anturien soveltamisesta yhteistyössä Uusiteknologia.fi:n mediamyynnin kanssa.